5.サーキットコース
Maqueenの用意ができたら、次は実際に走らせるコースを準備します。
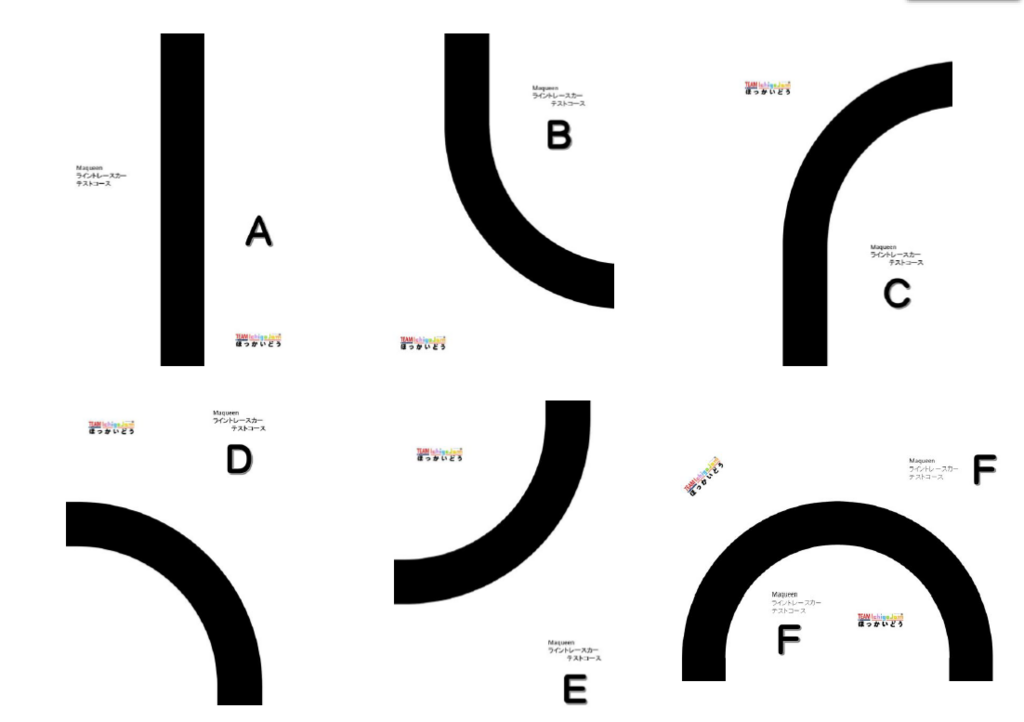
周回コースが作れる型紙を用意しましたので、こちらからダウンロードしてください。
コースは、レーザープリンター*5でA4サイズの紙にプリントアウトします。
※5 インクジェットプリンターの種類によっては、黒い色でも 0 にならず 1 になることがあります。
染料インクのインクジェットプリンターで印刷したコースは、この問題が起きやすいです。
顔料インクのインクジェットプリンターやトナー(コピー機やレーザープリンター)で印刷したコースは、ほぼ問題は起きません。
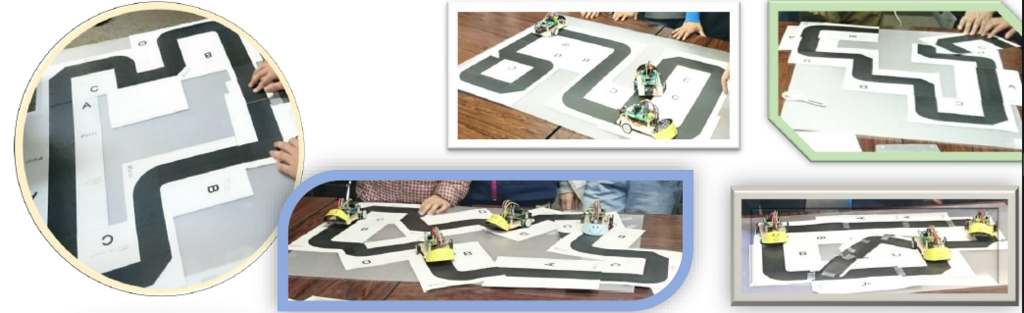
最初は、小さな周回コースで試すとよいです。
慣れてきたら、いろいろつなぎ合わせて複雑なコースを作りましょう。
自作する場合は、少し大きめの白い紙を用意します。
使い終わったカレンダーの裏を利用してもよいです。
黒線は幅2cm以上にしてください。
黒いペンなどで塗りつぶして書くのもよいですが、黒色のクラフトテープやビニルテープを貼り付けて作ると簡単です。
参考:オカモトテープ PEクロスNo.420
https://www.okamoto-inc.jp/industry/tape
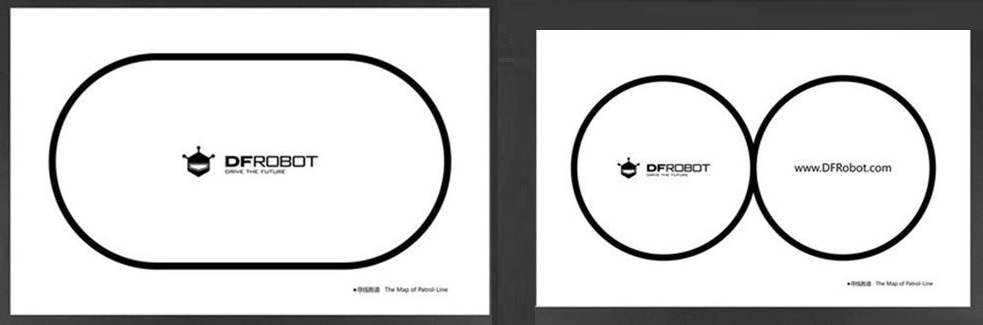
DF Robot社の販売サイトでもコースを販売しています。
線幅が2cmより少し狭いので、プログラムの作り方が違う考えのコースであることに注意してください。
https://www.dfrobot.com/product-1803.html
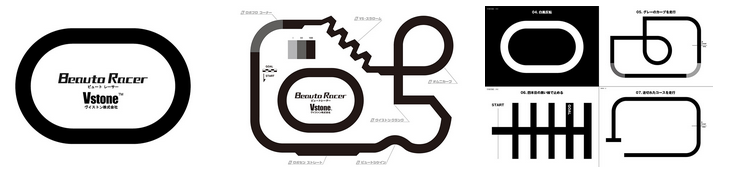
bisutonヴイストン株式会社が販売している「ビュート レーサー」のコースも参考になります。
こちらの線幅はだいたい2cmです。
https://www.vstone.co.jp/products/beauto_racer/