
4.車の動き方
IchigoJam BASICではモーターのON/OFFを、OUT2,1 / OUT2,0のように命令するのが一般的ですが、JAMCARではビット指定にてモーターを制御します。
動き方と命令の対応は次のとおりです。
全停止はOUT0です。
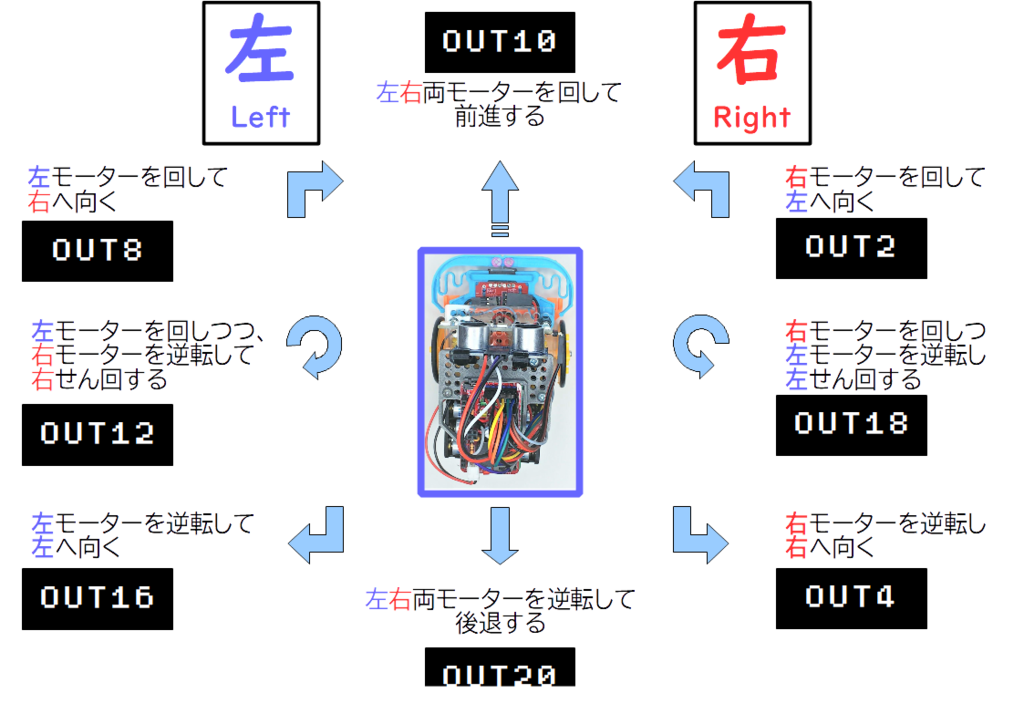
| 使用ポート | 用途 | 命令 |
| OUT2(PWM2) | 右モータ正転(前進) | OUT2,1 OUT2,0 または OUT2 |
| OUT3(PWM3) | 右モータ逆転(後退) | OUT3,1 OUT3,0 または OUT4 |
| OUT4(PWM4) | 左モータ正転(前進) | OUT4,1 OUT4,0 または OUT8 |
| OUT5(PWM5) | 左モータ逆転(後退) | OUT5,1 OUT5,0 または OUT16 |
OUT命令とWAIT命令を組み合わせれば、ほとんどの動きがつくれるでしょう。
10 OUT10:WAIT30
20 OUT8 :WAIT60
30 OUT10:WAIT30
40 OUT0
0.5秒間前進し、右へ進行方向を変えて、
そのまま0.5秒間前進して停止
10 OUT10:WAIT60
20 OUT0 :WAIT120
30 OUT20:WAIT60
40 OUT0
1秒間前進し、2秒間停止。
そのまま1秒間後退し、停止
モータを逆転するときは、OUT0:WAIT10(10以上)のように一旦停止を入れてください。
◆試してみよう◆
このように、JAMCARを動かすにはOUT命令とWAIT命令を、どんどん並べていけばよいのですが、決まったパターンの動きならば、計算式で動きを作ることもできます。
OUTとWAITが2行しかない、次のプログラムで確かめてみてください。
500 FOR A=-6 TO 5
510 W=ABS(A)*5+15
520 FOR B=0 TO 3
530 IF B<2 P=B*14+2 ELSE P=-B*4+16
540 OUT P:WAIT W
550 OUT 0:WAIT 9
560 NEXT
570 NEXT
580 GOTO500