
5.ラインセンサーの使い方
今回のJAMCARはいままでのセンサー(超音波距離センサー、接触センサー)とは別に、ラインセンサーを使って道路(黒い線)を感知します。

JAMCARのラインセンサーは、赤外線(IR = Infrared rays)の反射を利用したもので、3つ搭載しています。
今回のプログラムでは、こちのうち外側の2つのセンサーを使い、真ん中のセンサーは使いません(IchigoJamの入力ポートには接続していません)。
1つのセンサーは、赤外線ダイオード(発光部品)とフォトダイオード(受光部品)の組合せで構成され、発光した赤外線の反射を受光部品で受けて道路を検知します。
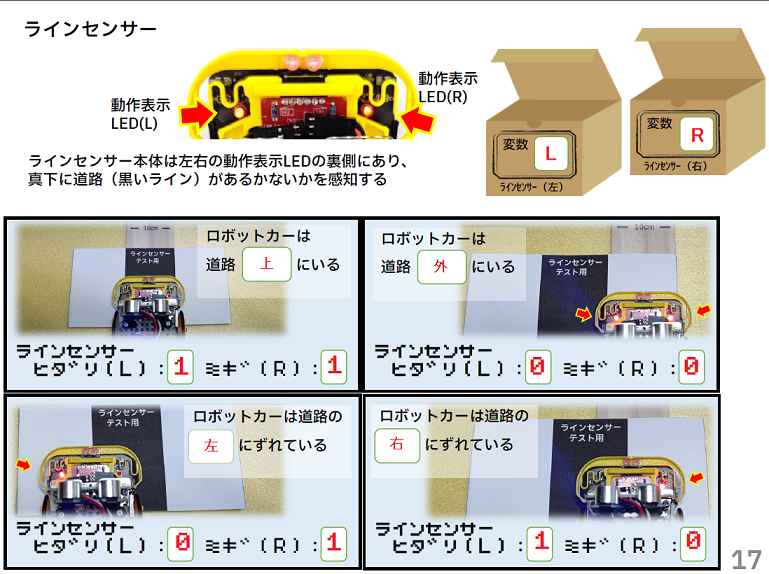
白い紙の上や机の上などの赤外線が反射するところでは、ラインセンサーの値が「0」になります。このときセンサー基板上の赤LEDも光ります。
逆に、黒い紙*1の上や、JAMCARを空中に持ち上げたりして、赤外線が反射しないところでは、ラインセンサーの値が「1」になり、赤LEDも光りません。
このしくみを使って黒線と白い紙を見分けます※2。
外側の2つのラインセンサーを使いますが、センサーの幅が約45mmありますので、コースは約60mm幅の道路としています。
道路の幅が狭いと、センサーが外れやすくなるので、プログラムは難しくなります。
今回、ラインセンサーの中央のセンサーは使いませんが、これを使うと1cm幅の黒ラインもトレース可能になりますが、プログラムは非常に難しくなります。
※1ラインセンサーの動作は外光や印刷物に影響されます。うまく白黒を見分けられていないときは、「Maqueen ラインセンサー」も参照してください
※2ラインの有無のみを検知するので、デジタル方式のラインセンサーですが、グレーも検知できるアナログ方式もあります。
プログラム3にアナログセンサーを使ったときのプログラムを参考掲載しています