b.ロボットカーの操縦かん編
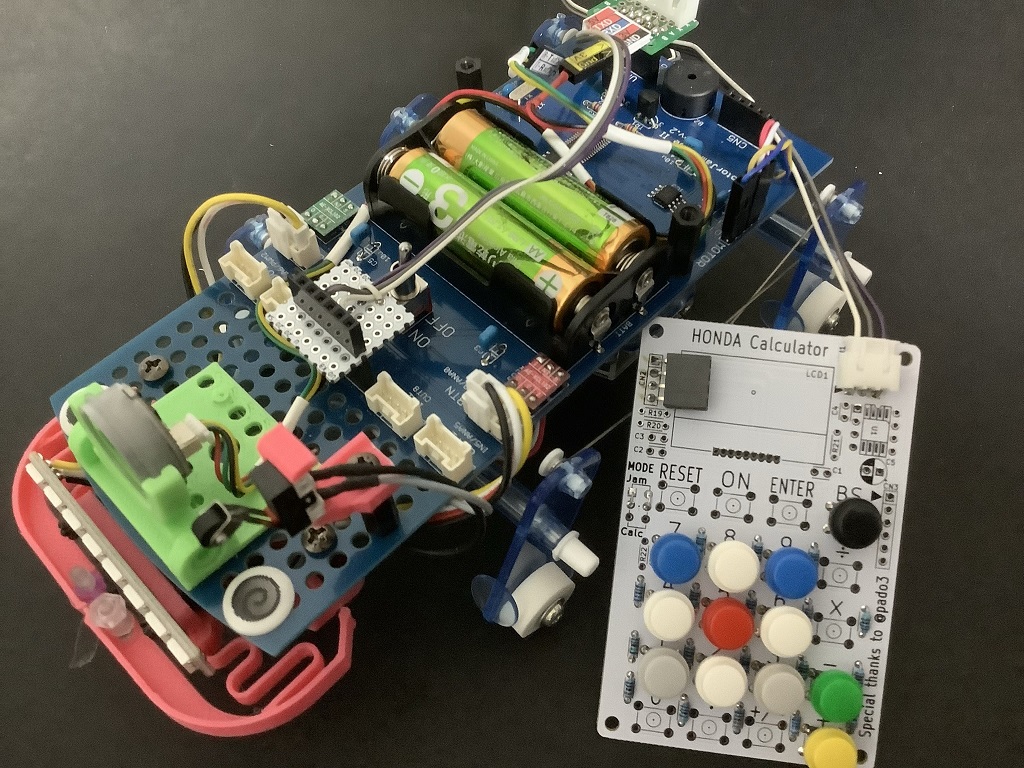
テンキーを操縦かんにみたてて、ロボットカー「ロボサバ」をリモコン操作できるようにしてみました。
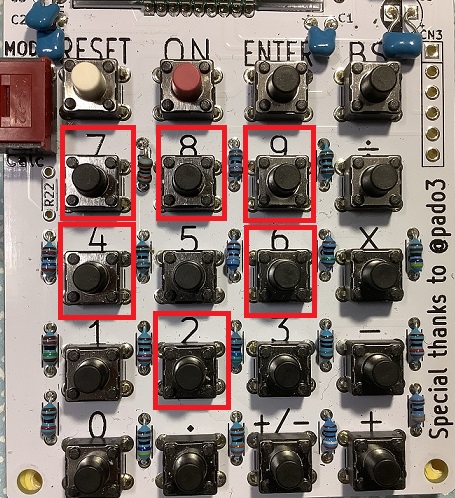
学習RPN電卓の6つキー[2,4,6,7,8,9]のみを使い、IchigoJamBASICで動くロボットを操ります(下の写真は電卓基板を改造して、必要なキーのみ取り付けたもの)。
※ロボサバとは、ロボット・サバイバル・プロジェクトの競技大会に出場しているロボットです。詳しくはこちら。
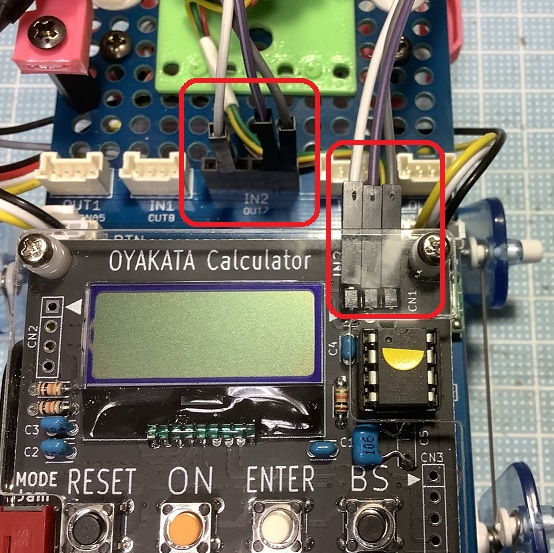
学習RPN電卓の、MODE(SW21)スイッチは[Jam]側にします。電卓用の電池は使いませんので、抜いておいたほうがよいでしょう。
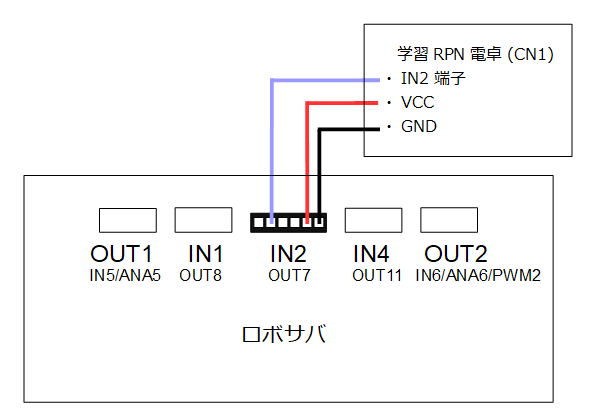
電卓基板のCN3端子(ピンコネクタ)とロボサバ基板のIN2端子(黒いソケット)を、リード線でつぎの図のように3か所をつなぎます。
リード線の長さは1mくらいにします。
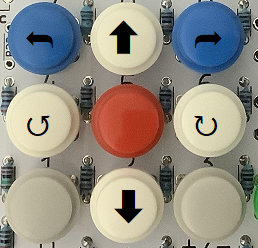
操縦するキーは[2],[4],[6],[7],[8],[9]の6つです。
ボタンを押した時だけ、その方向に動きます。
| 左 ⑦ | 前進 ⑧ | 右 ⑨ |
| 左回転 ④ | 右回転 ⑥ | |
| ② 後退 |
10 @ARUN ロボサバリモコン v0.0 2021/9/18(save0)
20 CLO:CLV
30 L=99
40 @MAIN
50 GOSUB @KEYPAD_SCAN
60 IF K=99 G= 0:S=””
70 IF K=19 G= 4:S=”KEY7-L”
80 IF K=12 G=20:S=”KEY8-F”
90 IF K=11 G=16:S=”KEY9-R”
100 IF K=18 G=52:S=”KEY4 “
110 IF K=10 G=28:S=”KEY6 “
120 IF K=14 G=60:S=”KEY2-B”
130 IF K=L GOTO@MAIN
140 L=K
150 IF G!=0 ?STR$(S),”OUT”;DEC$(G,2),”OUT'”;BIN$(G,6):?
160 OUT G
170 WAIT 15
180 GOTO @MAIN
10000 @KEYPAD_SCAN
10010 A=ANA(2)
10020 IF A>1013 K=99:RTN
10030 IF A<300 K=A/30 ELSE K=A/77+6
10040 IF A>897 K=A/39-5
10050 RTN